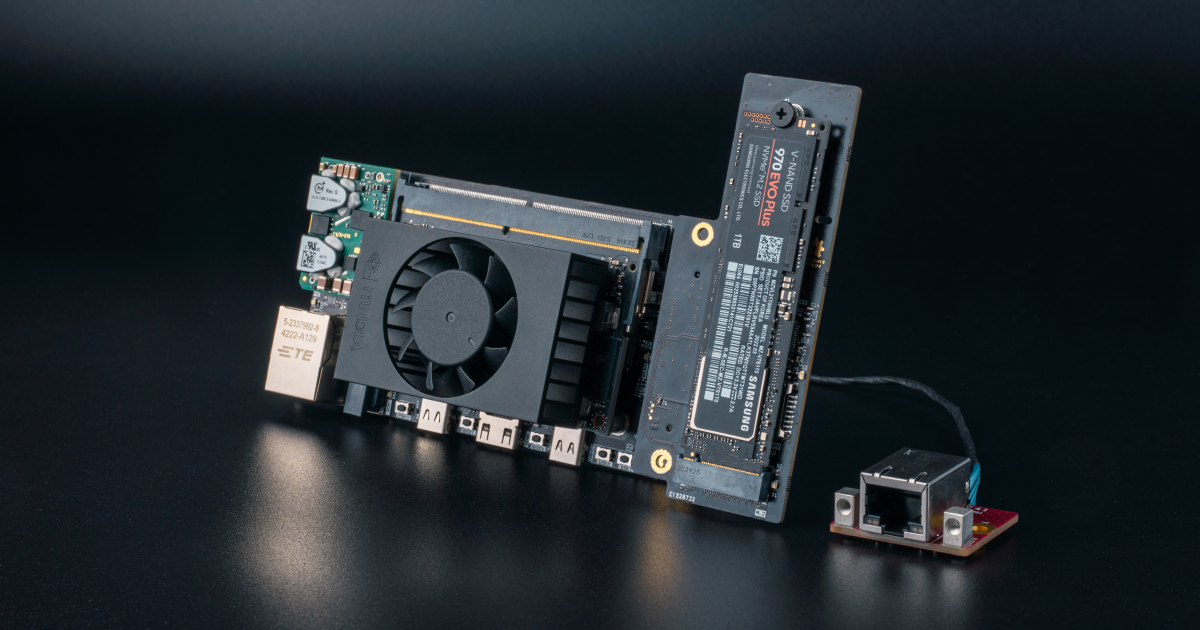
At the end of 2022, we introduced the open hardware Jetson Orin Baseboard as the successor to the original Jetson Nano Baseboard. The baseboard, like the original, has become the starting point for many customer projects involving complex edge AI-enabled...
OPEN SOURCE TOOLS, OPEN SIMULATION, OPEN SOFTWARE LIBRARIES
OPEN SOURCE TOOLS, OPEN SIMULATION, OPEN SOFTWARE LIBRARIES
Since its launch in 2021, we’ve been developing the Renode Zephyr Dashboard, a CI system combining structured data obtained from the Zephyr RTOS with our own Renode simulation framework, running a range of samples on over 470 simulated boards with RISC...
Antmicro’s typical industrial customer would work with us to create advanced devices based on high-end processing platforms - and the baseboards, adapters and bridges showcased on our Open Hardware Portal are a great starting point for this kind of product...
The OpenROAD project provides an open source ASIC toolchain that reduces the entry barriers to the field of hardware development and allows fast-turnaround feedback about your design, helping increase productivity of silicon teams. As such, it’s a great...
WebAssembly (Wasm), introduced in 2017, is a binary format designed as a portable compilation target aiming to execute at near-native speeds. With the addition of built-in Wasm virtual machines (VMs) in browsers, it has enabled the use of a wide range of...
The “killer feature” of open source is its transformative power in enabling collaborative vertical integration, where instead of building up silos of divergent capabilities, organizations can collaborate freely, combining their strengths and perspectives...